Laboratorija za robotiku Elektrotehničkog fakulteta Univerziteta u Beogradu bila je tema 34. epizode sedmog serijala emisije „Nauka privredi“. Pored razgovora o formiranju laboratorije i njenom cilju, u emisiji je detaljnije predstavljen projekat „ForNextCobot“ koji se realizuje u saradnji sa Institutom Mihailo Pupin. Na samom kraju predstvaljeni su planovi za buduće projekte i razvoj partnerstva saRead more


U najavi novog serijala emisije „Studio znanja“ govorili su Kosta Jovanović rukovodilac projekta ForNextCobot i članovi tima Maja Trumić (angažovana na razvoju estimatora za mehaničku impedansu robota) i Nikola Knežević (angažovan na zadacima upravljanja robota i prenosu obrasaca ponašanja čoveka na industrijskog robota na bazi učenja). Celu emisju možete pogledati u nastavku ili na sledećemRead more
Rukovodilac projekta dr Kosta Jovanović gostovao je u emisiji RTS Lab i tom prilikom razgovarao o primeni veštačke inteligencije na polju robotike. Emisiju možete pogledati u nastavku teksta ili na sledećem linku.Read more

M. Radmilovic, Dj. Urukalo, M. Janković, S. Dedijer Dujović, T. Dimkić Tomić, M. Trumić, K. Jovanović” Elbow joint stiffness functional scales based on Hill’s muscle model and genetic optimization”, Sensors 2023, 23(3), Published – DOI F. Bečanović, V. Bonnet, R. Dumas, K. Jovanović and S. Mohammed, „Force Sharing Problem During Gait Using Inverse Optimal Control,“Read more
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
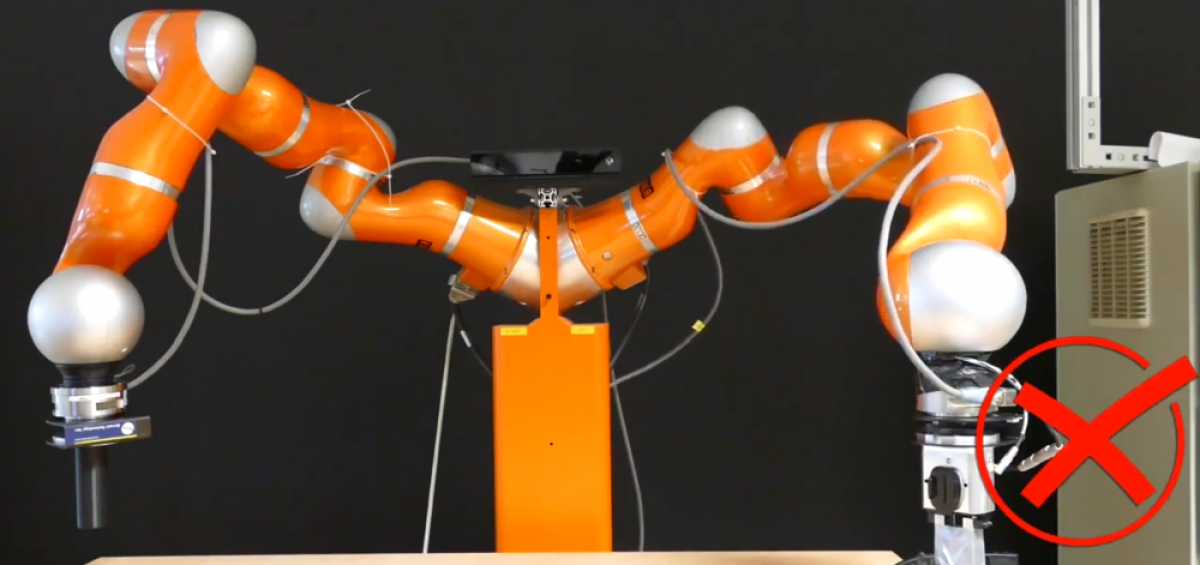
U skladu sa aktivnostima na trećem radnom zadatku projekta ForNextCobot, video ilustruje primenu algoritma za oblikovanje Kartezijanske krutosti (krutost u Dekartovom koordinatnom sistemu) završnog uređaja robota. Krutost je oblikovana korišćenjem kinematske redundanse robota na primeru “Peg in hole” zadatka. Prilikom izvršavanja “Peg in hole” zadatka u fazama ubacivanja i izvlačenja klina iz proreza na kalupuRead more